Constant false alarm rate
Constant false alarm rate (CFAR) detection refers to a common form of adaptive algorithm used in radar systems to detect target returns against a background of noise, clutter and interference.[1]
Principle
In the radar receiver the returning echoes are typically received by the antenna, amplified, down-converted and then passed through detector circuitry that extracts the envelope of the signal (known as the video signal). This video signal is proportional to the power of the received echo and comprises the wanted echo signal and the unwanted power from internal receiver noise and external clutter and interference.
The role of the constant false alarm rate circuitry is to determine the power threshold above which any return can be considered to probably originate from a target. If this threshold is too low, then more targets will be detected at the expense of increased numbers of false alarms. Conversely, if the threshold is too high, then fewer targets will be detected, but the number of false alarms will also be low. In most radar detectors, the threshold is set in order to achieve a required probability of false alarm (or equivalently, false alarm rate or time between false alarms).
If the background against which targets are to be detected is constant with time and space, then a fixed threshold level can be chosen that provides a specified probability of false alarm, governed by the probability density function of the noise, which is usually assumed to be Gaussian. The probability of detection is then a function of the signal-to-noise ratio of the target return. However, in most fielded systems, unwanted clutter and interference sources mean that the noise level changes both spatially and temporally. In this case, a changing threshold can be used, where the threshold level is raised and lowered to maintain a constant probability of false alarm. This is known as constant false alarm rate (CFAR) detection.
Cell-averaging CFAR
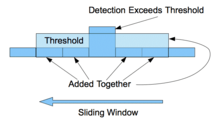
In most simple CFAR detection schemes, the threshold level is calculated by estimating the level of the noise floor around the cell under test (CUT). This can be found by taking a block of cells around the CUT and calculating the average power level. To avoid corrupting this estimate with power from the CUT itself, cells immediately adjacent to the CUT are normally ignored (and referred to as "guard cells"). A target is declared present in the CUT if it is both greater than all its adjacent cells and greater than the local average power level. The estimate of the local power level may sometimes be increased slightly to allow for the limited sample size. This simple approach is called a cell-averaging CFAR (CA-CFAR).
Other related approaches calculate separate averages for the cells to the left and right of the CUT, and then use the greatest-of or least-of these two power levels to define the local power level. These are referred to as greatest-of CFAR (GO-CFAR) and least-of CFAR (LO-CFAR) respectively, and can improve detection when immediately adjacent to areas of clutter.
Sophisticated CFAR approaches
More sophisticated CFAR algorithms can adaptively select a threshold level by taking a rigorous account of the statistics of the background in which targets are to be detected. This is particularly common in maritime surveillance (radar) applications, where the background of sea clutter is particularly spikey and not well approximated by additive white Gaussian noise. This is a difficult detection problem, as it is difficult to differentiate between spikes due to the sea surface returns and spikes due to valid returns from, for example, submarine periscopes. The K-distribution is a popular distribution for modelling sea clutter characteristics.
See also
References
- ↑ Scharf, Louis L. Statistical Signal Processing: Detection, Estimation, and Time Series Analysis. Addison Wesley, NY. ISBN 0-201-19038-9.