Cyclogyro
The cyclogyro, or cyclocopter, is an aircraft design that uses cyclorotors as the principal source of lift, propulsion, and control. They are capable of vertical take off and landing and hovering performance like a helicopter, without the same disadvantages such as limited forward speed, very high noise and vibration levels, limited flight altitude etc. The biggest hope of Cyclocopter developers, which remains unrealised in any flying prototypes, is to achieve higher efficiency in terms of lift per engine horsepower (aka Power Loading) which would translate into higher lifting capability and longer flight range. Although a number of cyclogyros were built in the 1930s, none were known to have successfully flown until 2011. The cyclogyro should not be mistaken for Flettner airplanes, the unsuccessful and aerodynamically different aircraft designs using cylindrical wings which attempted to harness the Magnus effect.
Function
The cyclogyro wing resembles a paddle wheel, with airfoils replacing the paddles. The airfoils' pitch (angle of attack) is adjusted either collectively (by means of a control ring with links to all blades, which is located eccentrically and variably relative to the rotor's axis of rotation) or the blades are individually adjustable in pitch and are adjusted continually by the control system as they move around the rotor's axis. In normal forward flight the airfoils are given a slight positive pitch at the upper and forward portions of their arc, producing lift and forward thrust. They are given flat or negative pitch at the bottom, and are "flat" through the rest of the circle to produce little or no lift in other directions. The pitch can be adjusted to change the thrust profile, allowing the cyclogyro to travel in any direction.[1] Differential thrust between the two wings (one on either side of the fuselage) can be used to turn the aircraft around its vertical axis, although conventional tail surfaces are generally used as well.[2]

History
Early designs
Jonathan Edward Caldwell appears to have been the first to patent the concept, and invent the term. He filed a patent on the concept that was granted in 1927, but immediately moved on to an ornithopter design and then an autogyro.[3] Several attempts to build a working cyclogyro were made by other designers. The earliest full-sized example appears to be the Schroeder S1 from 1930, which used the cyclogyro "wheels" for forward thrust only. Adolf Rohrbach of Germany designed a full VTOL version in 1933,[4] which was later developed in the US and featured a tall fish-like fuselage to keep the wings well clear of the ground.[5] Another early example was by Rahn Aircraft in 1935, which used two much larger chord wings instead of a multi-blade wheel driven by a 240 hp supercharged Wright Whirlwind[6] In 1935 NACA carried out a series of wind tunnel experiments on the cyclogyro concept, and found that the power required to turn the wheels was much higher than expected. Theoretical tools of the era simply weren't useful for prediction on the highly asymmetrical lift profiles and the greatly simplified models they used varied dramatically from real-world results. Early experiments then ended.
Recent advances
The concept has recently been applied to smaller unmanned aerial vehicle designs, where the hovering capability would be particularly useful.[7][8][9] Several of these designs have produced flying prototype models:
- In 2007 a team at the University of Singapore built a working model of cyclogyro, although it has only flown in tethered flight. Their cycloidal model was a modified helicopter, with the rotor replaced with two sideways cycloidal rotors, each with three blades sticking out of them in the perpendicular.[10]
- A team at Northwestern Polytechnical University in China built a free flying Cyclogyro. This design used two cycloidal rotors for the efficient generation of lift and small and noisy conventional head and tail rotors to stabilize the craft and provide control of its horizontal position and direction of flight. Video of the team's test flights can be found here. In September 2013 another Cyclocopter model was flight tested in China
- In December 2011 a team at the University of Maryland successfully built and tested a micro Cyclocopter, as seen here. Their design does not require a head rotor in addition to the usual tail rotor.
- The Austrian company Innovative Aerodynamic Technologies (IAT) premiered a 4 rotor cyclogyro at the Paris Air Show in June 2011. IAT has christened their creation Project D-DALUS.[11] A video can be found here.
- A team at the Seoul National University has built and in December 2012 successfully demonstrated a stable, mostly hovering flight of a 4 rotor Cyclocopter
The Korean team design solution provides for stable and controllable flight by having two pairs of the counter-rotating rotors which are parallel to each other and rotate at the same rpm. However this approach will not work for the higher forward speeds. Not one of the teams (mentioned above) so far has achieved the Power Loading (Lift/Power in kgf/hp) which is any better than that achieved by the helicopters. The University of Maryland team and the team in China use individual motors for each rotor for stability by varying their rpm. Using a number of individual motors makes that design heavier, more complicated and costlier. The Korean team has announced the building of a two main rotor 90 kg UAV back in 2012.

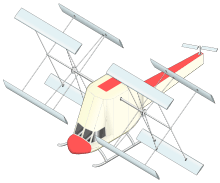
A European Seventh Framework Programme consortium, the CROP,[12] also studied cycloidal rotors with the optic of optimizing their performances. Within this project, various possible aircraft configurations were considered. One of those is the Heligyro, for which a conceptual aeroelastic study rendering is shown. A 3-meter demonstrator is expected to fly in 2016 along with the 20 kg D-DALUS.[13]
Future developments
Future developments, such as a variable cycloidal rotor, may improve the cyclogyro design. This technology allows the blades to travel about the horizontal axis along the most aerodynamically desirable orbit as continuously determined by the control system. This orbit will generally be non-circular and elongated, with that orbit shape dynamically modified by the control system as the flight regime and conditions change to keep the relative airflow about the blades optimized. The dynamic counterbalancing of the blades radial movements is used to keep the rotor balanced. This design would also allow their operation and the blade orbit shape to be optimized not only for the highest efficiency, but alternatively also for the highest flight speed or for the highest possible lifting capability or for the most silent operation. In addition to the horizontally elongated blade orbits being conducive to greater stability, the ability of this technology to precisely control in real time the localization and distribution of the lift/thrust generation may also largely eliminate the stability issues which is the most serious problem faced by current cyclogyro designs.; the second biggest problem faced by the current designs, namely that of blade bending due to the centrifugal forces, can also be addressed via the trajectory shape as on flat or nearly flat portions of the trajectory the centrifugal force acting on the blades will respectively be either zero or small.
See also
- FanWing
- Flettner airplane
- Fixed-wing aircraft
- Rotary-wing aircraft
- Ornithopter
- Gyroplane
- VTOL/STOL/VSTOL/STOVL
- Voith Schneider Propeller
References
- ↑ The Development of cyclogyro
- ↑ The Cyclogyros, Planned paddle-wheel aeroplanes
- ↑ "The Fantastically Flighty Gray Goose"
- ↑ Shackleton, W.S. (November 2, 1933), "The Rohrbach Rotating Wing Aeroplane", Flight, XXV (1297): 1087–1090
- ↑ "Rohrbach Cyclogyro"
- ↑ Rahn Aerofiles.
- ↑ Aerodynamics of the Cyclogyro aps.org
- ↑ The research on the performance of cyclogyro aiaa.org
- ↑ Development of a Cyclogyro-based Flying Robot with Variable Attack Angle Mechanisms ieee.org
- ↑ Simonite, Tom (2008-02-22). "Flying 'paddleboat' may finally take off". NewScientist.com news service.
- ↑ IAT (2012-10-11). "D-DALUS Website". http://iat21.at/. External link in
|publisher=(help) - ↑ CROP (2014-11-10). "CROP Project Website".
- ↑ http://www.janes.com/article/54330/dsei-2015-iat21-showcases-cyclogyro-helicopter-for-improved-lift-and-increased-efficiency
Further reading
- "The Cyclogyro", Vertiflight, The American Helicopter Society, 2005, Vol. 51; No. 2, pages 16–19
External links
![]() Media related to Cyclogyro at Wikimedia Commons
Media related to Cyclogyro at Wikimedia Commons
- Another Look at 1930's Cyclogyro Plane Design
- A small cyclogyro in tethered flight
- A series of Cyclocopters was developted in Seoul National University, Korea
- YouTube: Test flight of a Cyclocopter in Korea
- YouTube: Test flight of a Cyclogyro in Europe
- The CROP Project: an European research consortium working on the cyclogyro concept and its optimization