Differential wheeled robot
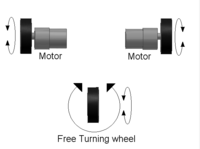
A differential wheeled robot is a mobile robot whose movement is based on two separately driven wheels placed on either side of the robot body. It can thus change its direction by varying the relative rate of rotation of its wheels and hence does not require an additional steering motion.
To balance the robot, additional wheels or casters may be added.
Details
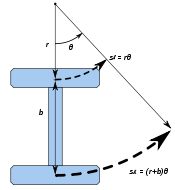
If both the wheels are driven in the same direction and speed, the robot will go in a straight line. If both wheels are turned with equal speed in opposite directions, as is clear from the diagram shown, the robot will rotate about the central point of the axis. Otherwise, depending on the speed of rotation and its direction, the center of rotation may fall anywhere on the line defined by the two contact points of the tires. While the robot is traveling in a straight line, the center of rotation is an infinite distance from the robot. Since the direction of the robot is dependent on the rate and direction of rotation of the two driven wheels, these quantities should be sensed and controlled precisely.
A differentially steered robot is similar to the differential gears used in automobiles in that both the wheels can have different rates of rotations, but unlike the differential gearing system,a differentially steered system will have both the wheels powered. Differential wheeled robots are used extensively in robotics, since their motion is easy to program and can be well controlled. Virtually all consumer robots on the market today use differential steering primarily for its low cost and simplicity.
Examples of differential wheeled robots
- Pioneer, PeopleBot, PowerBot & PatrolBot- the ActivMedia Robotics mobile robots.
- Khepera and e-puck
- Sbot
- Alice
- Roomba
- RoboMow
- Shonkbot, a minimal-cost, Arduino-based teaching robot[1]
- Thymio
- Giraff
- Big Trak
References
- ↑ "Shonkbot!". Bristol Hackspace.
External links
- A Tutorial and Elementary Trajectory Model for the Differential Steering System of Robot Wheel Actuators by G.W. Lucas at the open source Rossum Project