Fiducial marker

A fiducial marker or fiducial is an object placed in the field of view of an imaging system which appears in the image produced, for use as a point of reference or a measure. It may be either something placed into or on the imaging subject, or a mark or set of marks in the reticle of an optical instrument.
Accuracy
In high-resolution optical microscopy, fiducials can be used to actively stabilize the field of view. Stabilization to better than 0.1 nm is achievable.[1]
Applications
Physics
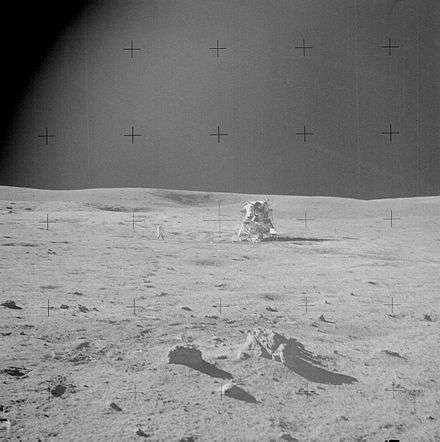
In physics, 3D computer graphics, and photography, fiducials are reference points: fixed points or lines within a scene to which other objects can be related or against which objects can be measured. Cameras outfitted with Réseau plates produce these reference marks (also called Réseau crosses) and are commonly used by NASA. Such marks are closely related to the timing marks used in optical mark recognition.
Geographical Survey
Airborne geophysical surveys also use the term "fiducial" as a sequential reference number in the measurement of various geophysical instruments during a survey flight. This application of the term evolved from air photo frame numbers that were originally used to locate geophysical survey lines in the early days of airborne geophysical surveying. This method of positioning has since been replaced by GPS, but the term "fiducial" continues to be used as the time reference for data measured during flights.
Augmented Reality
In applications of augmented reality, fiducials help resolve several problems of integration between the real world view and the synthetic images that augment it. Fiducials of known pattern and size can serve as real world anchors of location, orientation and scale. They can establish the identity of the scene or objects within the scene. For example, a fiducial printed on one page of an alternative reality popup book would identify the page to allow the system to select the augmentation content. It would also serve to moor the coordinates of the augmented content to the three dimensional location, orientation and scale of the open book, helping to create a stable and accurate fusion of real and synthetic imagery.
A slightly more complex example would be multiple fiducials, each attached to an individual piece in an alternative reality board game.
Metrology
The appearance of markers in images may act as a reference for image scaling, or may allow the image and physical object, or multiple independent images, to be correlated. By placing fiducial markers at known locations in a subject, the relative scale in the produced image may be determined by comparison of the locations of the markers in the image and subject. In applications such as photogrammetry, the fiducial marks of a surveying camera may be set so that they define the principal point, in a process called "collimation". This would be a creative use of how the term collimation is conventionally understood.
Fiducial Marker Sets
Some barcode readers can estimate the translation, orientation, and vertical depth of a known-size barcode relative to the barcode reader.[2]
Some sets of fiducial markers are specifically designed to allow rapid, low-latency detection of the 2D location, 2D orientation, and identity of hundreds of unique fiducial markers. For example, the "amoeba" reacTIVision fiducials, the d-touch fiducials,[3][4][5] or the TRIP circular barcode tags (ringcodes).[6]
Medical imaging
Fiducial markers are used in a wide range of medical imaging applications. Images of the same subject produced with two different imaging systems may be correlated by placing a fiducial marker in the area imaged by both systems. In this case, a marker which is visible in the images produced by both imaging modalities must be used. By this method, functional information from SPECT or positron emission tomography can be related to anatomical information provided by magnetic resonance imaging (MRI).[7] Similarly, fiducial points established during MRI can be correlated with brain images generated by magnetoencephalography to localize the source of brain activity. Such fiducial points or markers are often created in tomographic images such as computed tomography, magnetic resonance and positron emission tomography images using a device known as the N-localizer.[8][9][10][11][12][13][14][15][16][17][18]
ECG
In electrocardiography, fiducial points are landmarks on the ECG complex such as the isoelectric line (PQ junction), and onset of individual waves such as PQRST.
Cell Biology
In processes that involve following a labelled molecule as it is incorporated in some larger polymer, such markers can be used to follow the dynamics of growth/shrinkage of the polymer, as well as its movement. Commonly used fiducial markers are fluorescently labelled monomers of bio-polymers. The task of measuring and quantifying what happens to these is borrowed from methods in physics and computational imaging like Speckle imaging.
Radio Therapy
In radiotherapy and radiosurgical systems, fiducial points are landmarks in the tumour to facilitate correct targets for treatment. In neuronavigation, a "fiducial spatial coordinate system" is used as a reference, for use in neurosurgery, to describe the position of specific structures within the head or elsewhere in the body. Such fiducial points or landmarks are often created in magnetic resonance imaging and computed tomography images by using the N-localizer.
Printed Circuit Board (PCB)
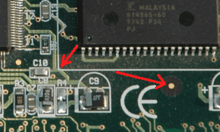
In printed circuit board (PCB) manufacturing, fiducial marks, also known as circuit pattern recognition marks, allow SMT placement equipment to accurately locate and place parts on boards. These devices locate the circuit pattern by providing common measurable points. They are usually made by leaving a circular area of the board bare from solder-mask coating. Inside this area is a circle exposing the copper plating beneath. This center metallic disc can be solder-coated, gold-plated or otherwise treated, although bare copper is most common if not a current-carrying contact.
Most placement machines are fed boards for assembly by a rail conveyor, with the board being clamped down in the assembly area of the machine. Each board will clamp slightly differently than the others, and the variance—which will generally be only tenths of a millimeter—is sufficient to ruin a board without proper calibration. Consequently, a typical PCB will have multiple fiducials to allow placement robots to precisely determine the board's orientation. By measuring the location of the fiducials relative to the board plan stored in the machine's memory, the machine can reliably compute the degree to which parts must be moved relative to the plan, called offset, to ensure accurate placement.
Using three fiducials enables the machine to determine offset in both the X and Y axes, as well as to determine if the board has rotated during clamping, allowing the machine to rotate parts to be placed to match. Parts requiring a very high degree of placement precision, such as ball grid array packages, may have additional fiducials near the package placement area of the board to further fine-tune the targeting.
Conversely, low end, low-precision boards may only have two fiducials, or use fiducials applied as part of the screen printing process applied to most circuit boards. Some very low-end boards may use the plated mounting screw holes as ersatz fiducials, although this yields very low accuracy.
For prototyping and small batch production runs, the use of a fiducial camera can greatly improve the process of board fabrication. By automatically locating fiducial markers, the camera automates board alignment. This helps with front to back and multilayer applications, eliminating the need for set pins.[19]
Printing
In color printing, fiducials—also called "registration black"—are used at the edge of the cyan, magenta, yellow and black (CMYK) printing plates so that they can be correctly aligned with each other.
See also
| Wikimedia Commons has media related to Images with rulers to indicate scale. |
| Wikimedia Commons has media related to Images with coins to indicate scale. |
References
- ↑ Carter, Ashley R.; King, Gavin M.; Ulrich, Theresa A.; Halsey, Wayne; Alchenberger, David; Perkins, Thomas T. (4 January 2007). "Stabilization of an optical microscope to 01 nm in three dimensions". Applied Optics. 46 (3): 421. doi:10.1364/AO.46.000421.
- ↑ Chih-Chung Lo; Chang, C.A. "Neural networks for bar code positioning in automated material handling". doi: 10.1109/IACET.1995.527607
- ↑ Ross Bencina and Martin Kaltenbrunner. "The Design and Evolution of Fiducials for the reacTIVision System".
- ↑ Ross Bencina, Martin Kaltenbrunner, and Sergi Jordà. "Improved Topological Fiducial Tracking in the reacTIVision System".
- ↑ "reacTIVision: a toolkit for tangible multi-touch surfaces".
- ↑ Diego Lopez de Ipina , Paulo R. S. Mendonca , Andy Hopper. "TRIP: a Low-Cost Vision-Based Location System for Ubiquitous Computing". 2002.
- ↑ Correlation of single photon emission CT with MR image data using fiduciary markers. BJ Erickson and CR Jack Jr., American Journal of Neuroradiology, Vol 14, Issue 3 713-720 (1993).
- ↑ Brown RA, Nelson JA (2012). "Invention of the N-localizer for stereotactic neurosurgery and its use in the Brown-Roberts-Wells stereotactic frame". Neurosurgery. 70 (2 Supplement Operative): 173–176. doi:10.1227/NEU.0b013e318246a4f7. PMID 22186842.
- ↑ Brown RA, Nelson JA (2015). "The origin and history of the N-localizer for stereotactic neurosurgery". Cureus. 7 (9): e323. doi:10.7759/cureus.323. PMC 4610741
 . PMID 26487999.
. PMID 26487999. - ↑ Brown RA (2015). "The mathematics of three N-localizers used together for stereotactic neurosurgery". Cureus. 7 (10): e341. doi:10.7759/cureus.341. PMC 4636133. PMID 26594605.
- ↑ Brown RA (2015). "The mathematics of four or more N-localizers for stereotactic neurosurgery". Cureus. 7 (10): e349. doi:10.7759/cureus.349. PMC 4641741. PMID 26623204.
- ↑ Heilbrun MP, Roberts TS, Apuzzo ML, Wells TH Jr, Sabshin JK (1983). "Preliminary experience with Brown-Roberts-Wells (BRW) computerized tomography stereotaxic guidance system". Journal of Neurosurgery. 59 (2): 217–222. doi:10.3171/jns.1983.59.2.0217. PMID 6345727.
- ↑ Thomas DG, Anderson RE, du Boulay GH (1984). "CT-guided stereotactic neurosurgery: experience in 24 cases with a new stereotactic system". Journal of Neurology, Neurosurgery & Psychiatry. 47 (1): 9–16. doi:10.1136/jnnp.47.1.9. PMC 1027634. PMID 6363629.
- ↑ Leksell L, Leksell D, Schwebel J (1985). "Stereotaxis and nuclear magnetic resonance". Journal of Neurology, Neurosurgery & Psychiatry. 48 (1): 14–18. doi:10.1136/jnnp.48.1.14. PMC 1028176. PMID 3882889.
- ↑ Thomas DG, Davis CH, Ingram S, Olney JS, Bydder GM, Young IR (1986). "Stereotaxic biopsy of the brain under MR imaging control". AJNR American Journal of Neuroradiology. 7 (1): 161–163. PMID 3082131.
- ↑ Heilbrun MP, Sunderland PM, McDonald PR, Wells TH Jr, Cosman E, Ganz E (1987). "Brown-Roberts-Wells stereotactic frame modifications to accomplish magnetic resonance imaging guidance in three planes". Applied Neurophysiology. 50 (1-6): 143–152. doi:10.1159/000100700. PMID 3329837.
- ↑ Maciunas RJ, Kessler RM, Maurer C, Mandava V, Watt G, Smith G (1992). "Positron emission tomography imaging-directed stereotactic neurosurgery". Stereotactic and Functional Neurosurgery. 58 (1-4): 134–140. doi:10.1159/000098986. PMID 1439330.
- ↑ Levivier M, Massager N, Wikler D, Lorenzoni J, Ruiz S, Devriendt D, David P, Desmedt F, Simon S, Van Houtte P, Brotchi J, Goldman S (2004). "Use of stereotactic PET images in dosimetry planning of radiosurgery for brain tumors: clinical experience and proposed classification". Journal of Nuclear Medicine. 45 (7): 1146–1154. PMID 15235060.
- ↑ https://www.youtube.com/watch?v=-tVZ-sdxG2o