Trochoidal wave
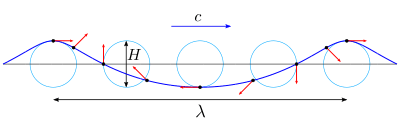



In fluid dynamics, a trochoidal wave or Gerstner wave is an exact solution of the Euler equations for periodic surface gravity waves. It describes a progressive wave of permanent form on the surface of an incompressible fluid of infinite depth. The free surface of this wave solution is an inverted (upside-down) trochoid – with sharper crests and flat troughs. This wave solution was discovered by Gerstner in 1802, and rediscovered independently by Rankine in 1863.
The flow field associated with the trochoidal wave is not irrotational: it has vorticity. The vorticity is of such a specific strength and vertical distribution that the trajectories of the fluid parcels are closed circles. This is in contrast with the usual experimental observation of Stokes drift associated with the wave motion. Also the phase speed is independent of the trochoidal wave's amplitude, unlike other nonlinear wave-theories (like those of the Stokes wave and cnoidal wave) and observations. For these reasons – as well as for the fact that solutions for finite fluid depth are lacking – trochoidal waves are of limited use for engineering applications.
In computer graphics, the rendering of realistic-looking ocean waves can be done by use of so-called Gerstner waves. This is a multi-component and multi-directional extension of the traditional Gerstner wave, often using fast Fourier transforms to make (real-time) animation feasible.[1]
Description of classical trochoidal wave
Using a Lagrangian specification of the flow field, the motion of fluid parcels is – for a periodic wave on the surface of a fluid layer of infinite depth:[2]

where and are the positions of the fluid parcels in the plane at time , with the horizontal coordinate and the vertical coordinate (positive upward, in the direction opposing gravity). The Lagrangian coordinates label the fluid parcels, with the centres of the circular orbits – around which the corresponding fluid parcel moves with constant speed Further is the wavenumber (and the wavelength), while is the phase speed with which the wave propagates in the -direction. The phase speed satisfies the dispersion relation:












which is independent of the wave nonlinearity (i.e. does not depend on the wave height ), and this phase speed the same as for Airy's linear waves in deep water.
The free surface is a line of constant pressure, and is found to correspond with a line , where is a (nonpositive) constant. For the highest waves occur, with a cusp-shaped crest. Note that the highest (irrotational) Stokes wave has a crest angle of 120°, instead of the 0° for the rotational trochoidal wave.[3]



The wave height of the trochoidal wave is The wave is periodic in the -direction, with wavelength and also periodic in time with period



In computer graphics

A multi-component and multi-directional extension of the Lagrangian description of the free-surface motion – as used in Gerstner's trochoidal wave – is used in computer graphics for the simulation of ocean waves.[1] For the classical Gerstner wave the fluid motion exactly satisfies the nonlinear, incompressible and inviscid flow equations below the free surface. However, the extended Gerstner waves do in general not satisfy these flow equations exactly (although they satisfy them approximately, i.e. for the linearised Lagrangian description by potential flow). This description of the ocean can be programmed very efficiently by use of the fast Fourier transform (FFT). Moreover, the resulting ocean waves from this process look realistically, as a result of the nonlinear deformation of the free surface (due to the Lagrangian specification of the motion): sharper crests and flatter troughs.
The mathematical description of the free-surface in these Gerstner waves can be as follows:[1] the horizontal coordinates are denoted as and , and the vertical coordinate is . The mean level of the free surface is at and the positive -direction is upward, opposing the Earth's gravity of strength The free surface is described parametrically as a function of the parameters and as well as of time The parameters are connected to the mean-surface points around which the fluid parcels at the wavy surface orbit. The free surface is specified through and with:











where is the hyperbolic tangent function, is the number of wave components considered, is the amplitude of component and its phase. Further is its wavenumber and its angular frequency. The latter two, and can not be chosen independently but are related through the dispersion relation:










with the mean water depth. In deep water () the hyperbolic tangent goes to one: The components and of the horizontal wavenumber vector determine the wave propagation direction of component







The choice of the various parameters and for and a certain mean depth determines the form of the ocean surface. A clever choice is needed in order to exploit the possibility of fast computation by means of the FFT. See e.g. Tessendorf (2001) for a description how to do this. Most often, the wavenumbers are chosen on a regular grid in -space. Thereafter, the amplitudes and phases are chosen randomly in accord with the variance-density spectrum of a certain desired sea state. Finally, by FFT, the ocean surface can be constructed in such a way that it is periodic both in space and time, enabling tiling.



In rendering, also the normal vector to the surface is often needed. These can be computed using the cross product () as:



The unit normal vector then is with the norm of



Notes
- 1 2 3 Tessendorf (2001)
- ↑ Lamb (1994, §251)
- ↑ Stokes, G.G. (1880), "Supplement to a paper on the theory of oscillatory waves", Mathematical and Physical Papers, Volume I, Cambridge University Press, pp. 314–326, OCLC 314316422
References
- Gerstner, F.J. (1802), "Theorie der Wellen", Abhandlunger der Königlichen Böhmischen Geselschaft der Wissenschaften, Prague. Reprinted in: Annalen der Physik 32(8), pp. 412–445, 1809.
- Craik, A.D.D. (2004), "The origins of water wave theory", Annual Review of Fluid Mechanics, 36: 1–28, Bibcode:2004AnRFM..36....1C, doi:10.1146/annurev.fluid.36.050802.122118
- Lamb, H. (1994), Hydrodynamics (6th ed.), Cambridge University Press, §251, ISBN 978-0-521-45868-9, OCLC 30070401 Originally published in 1879, the 6th extended edition appeared first in 1932.
- Rankine, W.J.M. (1863), "On the exact form of waves near the surface of deep water", Philosophical Transactions of the Royal Society of London, 153: 127–138, doi:10.1098/rstl.1863.0006
- Tessendorf, J. (2001), "Simulating ocean water" (PDF), SIGGRAPH 2001 (Simulating Nature: Realistic and Interactive Techniques), 26 pp.