Seifert surface
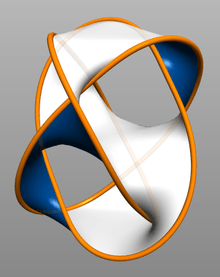
In mathematics, a Seifert surface (named after German mathematician Herbert Seifert[1][2]) is a surface whose boundary is a given knot or link.
Such surfaces can be used to study the properties of the associated knot or link. For example, many knot invariants are most easily calculated using a Seifert surface. Seifert surfaces are also interesting in their own right, and the subject of considerable research.
Specifically, let L be a tame oriented knot or link in Euclidean 3-space (or in the 3-sphere). A Seifert surface is a compact, connected, oriented surface S embedded in 3-space whose boundary is L such that the orientation on L is just the induced orientation from S, and every connected component of S has non-empty boundary.
Note that any compact, connected, oriented surface with nonempty boundary in Euclidean 3-space is the Seifert surface associated to its boundary link. A single knot or link can have many different inequivalent Seifert surfaces. A Seifert surface must be oriented. It is possible to associate surfaces to knots which are not oriented nor orientable, as well.
Examples
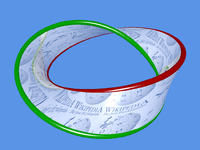
The standard Möbius strip has the unknot for a boundary but is not considered to be a Seifert surface for the unknot because it is not orientable.
The "checkerboard" coloring of the usual minimal crossing projection of the trefoil knot gives a Mobius strip with three half twists. As with the previous example, this is not a Seifert surface as it is not orientable. Applying Seifert's algorithm to this diagram, as expected, does produce a Seifert surface; in this case, it is a punctured torus of genus g=1, and the Seifert matrix is

Existence and Seifert matrix
It is a theorem that any link always has an associated Seifert surface. This theorem was first published by Frankl and Pontrjagin in 1930.[3] A different proof was published in 1934 by Herbert Seifert and relies on what is now called the Seifert algorithm. The algorithm produces a Seifert surface , given a projection of the knot or link in question.

Suppose that link has m components (m=1 for a knot), the diagram has d crossing points, and resolving the crossings (preserving the orientation of the knot) yields f circles. Then the surface is constructed from f disjoint disks by attaching d bands. The homology group is free abelian on 2g generators, where

- g = (2 + d − f − m)/2
is the genus of . The intersection form Q on is skew-symmetric, and there is a basis of 2g cycles
- a1,a2,...,a2g
with
- Q=(Q(ai,aj))
the direct sum of g copies of
- .

The 2g2g integer Seifert matrix

- V=(v(i,j)) has
the linking number in Euclidean 3-space (or in the 3-sphere) of ai and the pushoff of aj out of the surface, with

- *


where V*=(v(j,i)) the transpose matrix. Every integer 2g2g matrix with * arises as the Seifert matrix of a knot with genus g Seifert surface.

The Alexander polynomial is computed from the Seifert matrix by *), which is a polynomial in the indeterminate of degree . The Alexander polynomial is independent of the choice of Seifert surface , and is an invariant of the knot or link.



The signature of a knot is the signature of the symmetric Seifert matrix . It is again an invariant of the knot or link.

Genus of a knot
Seifert surfaces are not at all unique: a Seifert surface S of genus g and Seifert matrix V can be modified by a topological surgery; in order to be replaced by a Seifert surface S' of genus g+1 and Seifert matrix
- V'=V.

The genus of a knot K is the knot invariant defined by the minimal genus g of a Seifert surface for K.
For instance:
- An unknot—which is, by definition, the boundary of a disc—has genus zero. Moreover, the unknot is the only knot with genus zero.
- The trefoil knot has genus one, as does the figure-eight knot.
- The genus of a (p,q)-torus knot is (p − 1)(q − 1)/2
- The degree of the Alexander polynomial is a lower bound on twice the genus of the knot.
A fundamental property of the genus is that it is additive with respect to the knot sum:

In general, the genus of a knot is difficult to compute, and the Seifert algorithm usually does not produce a Seifert surface of least genus. For this reason other related invariants are sometimes useful. The canonical genus of a knot is the least genus of all Seifert surfaces that can be constructed by the Seifert algorithm, and the free genus is the least genus of all Seifert surfaces whose complement in is a handlebody. (The complement of a Seifert surface generated by the Seifert algorithm is always a handlebody.) For any knot the inequality obviously holds, so in particular these invariants place upper bounds on the genus.[4]




See also
References
- ↑ Seifert, H. (1934). "Über das Geschlecht von Knoten". Math. Annalen. 110 (1): 571–592. doi:10.1007/BF01448044. (German)
- ↑ van Wijk, Jarke J.; Cohen, Arjeh M. (2006). "Visualization of Seifert Surfaces". IEEE Trans. on Visualization and Computer Graphics. 12 (4): 485–496. doi:10.1109/TVCG.2006.83.
- ↑ Frankl, F.; Pontrjagin, L. (1930). "Ein Knotensatz mit Anwendung auf die Dimensionstheorie". Math. Annalen. 102 (1): 785–789. doi:10.1007/BF01782377. (German)
- ↑ Brittenham, Mark (24 September 1998). "Bounding canonical genus bounds volume". Retrieved 25 February 2016.
External links
- The SeifertView programme of Jack van Wijk visualizes the Seifert surfaces of knots constructed using Seifert's algorithm.
| Hyperbolic |
|
|---|---|
| Satellite | |
| Torus | |
| Invariants | |
| Notation & operations | |
| Other | |
| |