Four-vertex theorem
The classical four-vertex theorem states that the curvature function of a simple, closed, smooth plane curve has at least four local extrema (specifically, at least two local maxima and at least two local minima). The name of the theorem derives from the convention of calling an extreme point of the curvature function a vertex. This theorem has many generalizations, including a version for space curves where a vertex is defined as a point of vanishing torsion.
Examples
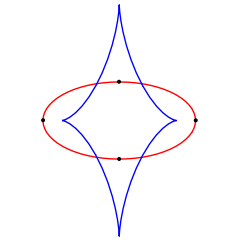
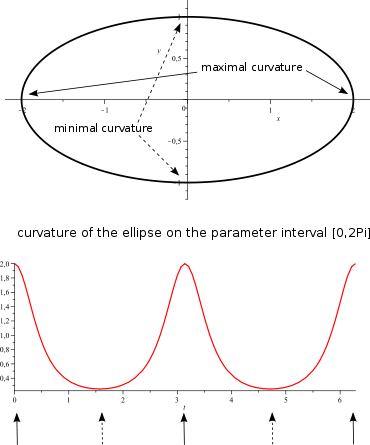
An ellipse has exactly four vertices: two local maxima of curvature where it is crossed by the major axis of the ellipse, and two local minima of curvature where it is crossed by the minor axis. In a circle, every point is both a local maximum and a local minimum of curvature, so there are infinitely many vertices.
History
The four-vertex theorem was first proved for convex curves (i.e. curves with strictly positive curvature) in 1909 by Syamadas Mukhopadhyaya.[1] His proof utilizes the fact that a point on the curve is an extremum of the curvature function if and only if the osculating circle at that point has 4th-order contact with the curve (in general the osculating circle has only 3rd-order contact with the curve). The four-vertex theorem was proved in general by Adolf Kneser in 1912 using a projective argument.[2]
Converse
The converse to the four-vertex theorem states that any continuous, real-valued function of the circle that has at least two local maxima and two local minima is the curvature function of a simple, closed plane curve. The converse was proved for strictly positive functions in 1971 by Herman Gluck as a special case of a general theorem on pre-assigning the curvature of n-spheres.[3] The full converse to the four-vertex theorem was proved by Björn Dahlberg shortly before his death in January 1998, and published posthumously.[4] Dahlberg's proof uses a winding number argument which is in some ways reminiscent of the standard topological proof of the Fundamental Theorem of Algebra.[5]
Application to mechanics
One corollary of the theorem is that a homogeneous, planar disk rolling on a horizontal surface under gravity has at least 4 balance points. A discrete version of this is that there cannot be a monostatic polygon. However, in three dimensions there do exist monostatic polyhedra, and there also exists a convex, homogeneous object with exactly 2 balance points (one stable, and the other unstable), the Gömböc.
Discrete variations
There are several discrete versions of the four-vertex theorem, both for convex and non-convex polygons.[6] Here are some of them:
- (Bilinski) The sequence of angles of a convex equilateral polygon has at least four extrema.
- The sequence of side lengths of a convex equiangular polygon has at least four extrema.
- (Musin) A circle circumscribed around three consecutive vertices of the polygon is called extremal if it contains all remaining vertices of the polygon, or has none of them in its interior. A convex polygon is generic if it has no four vertices on the same circle. Then every generic convex polygon has at least four extremal circles.
- (Legendre–Cauchy) Two convex n-gons with equal corresponding side length have either zero or at least 4 sign changes in the cyclic sequence of the corresponding angle differences.
- (A.D. Alexandrov) Two convex n-gons with parallel corresponding sides and equal area have either zero or at least 4 sign changes in the cyclic sequence of the corresponding side lengths differences.
Some of these variations are stronger than the other, and all of them imply the (usual) four-vertex theorem by a limit argument.
Generalizations to space curve
The stereographic projection from the sphere to the plane preserves critical points of geodesic curvature. Thus simple closed spherical curves have four vertices. Furthermore, on the sphere vertices of a curve correspond to points where its torsion vanishes. So for space curves a vertex is defined as a point of vanishing torsion. In 1994 V. D. Sedykh [7] showed that every simple closed space curve which lies on the boundary of a convex body has four vertices. In 2015 Mohammad Ghomi [8] generalized Sedykh's theorem to all curves which bound a locally convex disk.
See also
References
- ↑ Mukhopadhyaya, S. (1909). "New methods in the geometry of a plane arc". Bull. Calcutta Math. Soc. 1: 21–27.
- ↑ Kneser, Adolf (1912). "Bemerkungen uber die Anzahl der Extrema des Krummung auf geschlossenen Kurven und uber verwandte Fragen in einer nicht euklidischen Geometrie". Festschrift Heinrich Weber. Teubner. pp. 170–180.
- ↑ Gluck, Herman (1971). "The converse to the four-vertex theorem". L'Enseignement Mathématique. 17: 295–309.
- ↑ Dahlberg, Björn (2005). "The converse of the four vertex theorem". Proc. Amer. Math. Soc. 133 (7): 2131–2135. doi:10.1090/S0002-9939-05-07788-9.
- ↑ DeTurck, D.; Gluck, H.; Pomerleano, D. & Vick, D.S. (2007). "The Four Vertex Theorem and Its Converse" (PDF). Notices of the American Mathematical Society. 54 (2): 9268. arXiv:math/0609268
 . Bibcode:2006math......9268D.
. Bibcode:2006math......9268D. - ↑ Pak, I. Lectures on Discrete and Polyhedral Geometry, Section 21.
- ↑ Sedykh, V.D. (1994). "Four vertices of a convex space curve". Bull. London Math. Soc. 26 (2): 177–180. doi:10.1112/blms/26.2.177.
- ↑ Ghomi, Mohammad (2015), Boundary torsion and convex caps of locally convex surfaces, arXiv:1501.07626
External links
- The Four Vertex Theorem and Its Converse—An expository article which explains Robert Osserman's simple proof of the Four-vertex theorem and Dahlberg's proof of its converse, offers a brief overview of extensions and generalizations, and gives biographical sketches of Mukhopadhyaya, Kneser and Dahlberg.